适用于小直径,不可进入的长距离和曲线隧道 – 对整个管道的位置精度有很高的要求。
该导向系统是为无法进入机器和管道且不存在通往掘进机的视线的项目而开发的 – 因此,无法在隧道区域使用已知参考点进行常规控制测量。
掘进机垂直位置既可以使用经典液位系统计算,也可以使用新集成的垂直耦合导向来计算。
该系统不要求管道通视条件,特别适用于小直径以及极小半径曲线隧道。
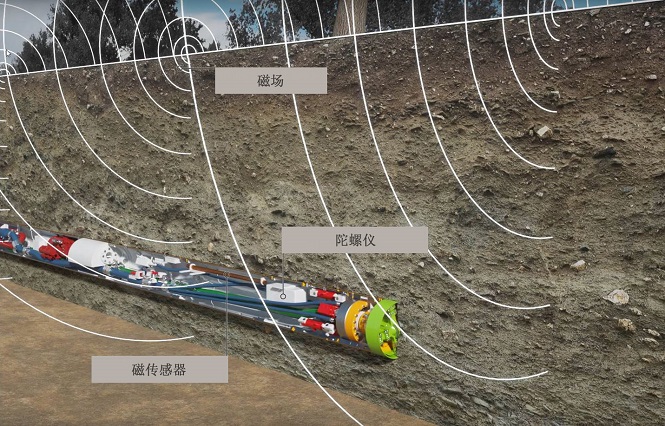 该系统设计为混合系统 - 由基于光学陀螺仪的主系统和基于电磁探头的辅助系统组成。
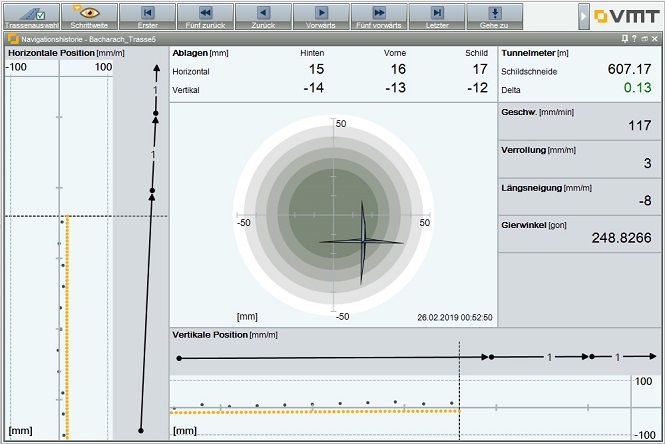
初级系统提供连续的高频相对位置数据,作为精确操控TBM的基础,而次级系统将自身对应到地表的参考线,以不时改善初级系统的相对位置。
因此,TUnIS Navigation MT陀螺仪EMS系统可以连续,精确地计算和显示掘进机位置。
该系统设计为混合系统 - 由基于光学陀螺仪的主系统和基于电磁探头的辅助系统组成。
初级系统提供连续的高频相对位置数据,作为精确操控TBM的基础,而次级系统将自身对应到地表的参考线,以不时改善初级系统的相对位置。
因此,TUnIS Navigation MT陀螺仪EMS系统可以连续,精确地计算和显示掘进机位置。