


在日常推进中,经常会遇到这类情况:要想保持掘进机偏差稳定,不得不保持一定的趋向前进,也就是想去的方向和实际走的方向不一致,与侧着身体走直线类似。
这个趋向就是所谓的漂移值。
漂移值的出现,意味着此时0mm/m已被漂移值所取代,当前不再是调向的分界点。
由来
从根本上说,漂移值的出现是掘进机的前进方向与掘进机自身的物理轴线不重合的结果,其起因是复合性的。可能是受刀盘自转,以及动力系统的结构性影响,掘进机会不自觉地向一侧偏斜;也可能是由于掘进机外部地质环境复杂且不均衡导致的;还可能是因管环拼装不合理导致的。诸多施工因素决定了掘进机的稳定前进状态必然是一个动态的曲线纠偏过程。所以漂移值的出现是不可避免的,而且因为起因的不确定性,漂移值又是动态变化的,难以精确量化预测。
分析
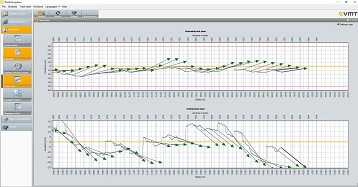
通过分析近期或地质环境相似的一段里程范围内的盾头姿态和趋向变化,可以找到一个相对稳定的漂移值,以此作为下一阶段掘进的参考。如左上图所示,黄线和蓝线分别为趋向和盾头姿态的变化曲线。可以看出,在截取的仅150m的掘进过程中,趋向保持+4mm/m时,盾头姿态保持基本稳定。除了从TUnIS导向系统导出历史数据,利用excel生成曲线图外,TUnIS的路径图模块也可以直观看到过往掘进过程中趋向的变化,有助于发现漂移值的蛛丝马迹。如左下图所示。
意义
掘进机的姿态控制包括偏差和趋向两个方面。通过不断寻找和修正真实漂移值的范围,以此为基础进行调向,就可以避免出现过度调向甚至导致趋向失控的情况出现,起到事半功倍的纠偏效果。
了解更多VMT中国详情,请访问VMT中国官方微信:VMTChina,官方微信二维码:
