

激光导向系统的工作原理是利用全站仪测站和后视两个已知点,设站定向后,再测量激光靶,然后计算掘进机姿态。 方位检查是系统每间隔一定时间自动对当前定向方位进行检查,目的是为了保证导向精度。方位检查结果会反映出测站的水平(左右)、垂直(上下)、里程(前后)三个方向的偏差,方位检查的结果可以及时反映导向姿态精度。 全站仪不稳定会造成方位检查超限的问题,从而导致掘进机姿态不稳定跳动,严重时会导致姿态不正确,影响操作手推进判断!
 图 1:TUnIS导向系统限差设置
图 1:TUnIS导向系统限差设置
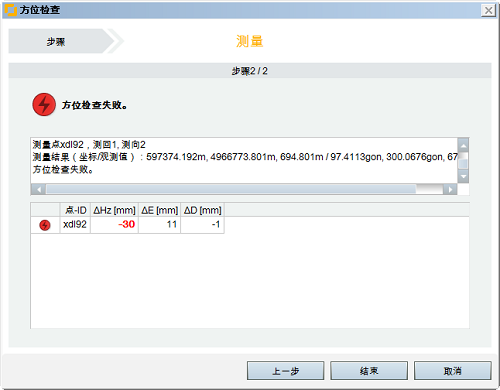 图 2:方位检查水平超限 30mm
图 2:方位检查水平超限 30mm
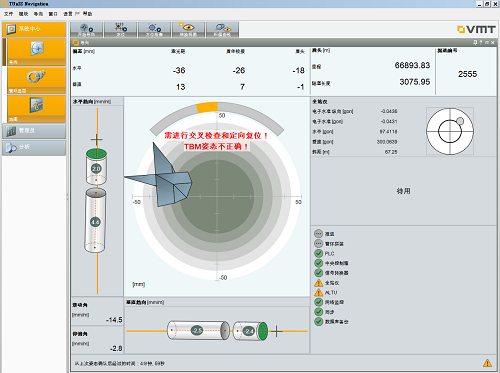 图 3:方位检查超限后导向系统提示掘进机姿态不正确
图 3:方位检查超限后导向系统提示掘进机姿态不正确
TUnIS方位检查模块包括限差(偏差限制)、设置(双面测量和测回数)、自动方位检查(时间间隔/里程间隔),特别是方位检查模块可以设置两个级别限差,当超过第一级别限差时,系统会提示方位检查超限;当超过第二级别限差时,导向系统将停止导向,提示当前姿态不正确。 设置信息如图1:最大水平偏差5mm,停止导向最大偏差15mm。 当方位检查超过5mm,提示超限;当方位检查水平偏差30mm(如图2),超过方位检查15mm限差,导向系统提示方位检查超限TBM姿态不正确(如图3),停止导向。 通过设置两个级别限差,设置自动方位检查时间间隔/里程间隔,方位检查能够有效检查测站及后视的稳定情况,及时发现测站位置变化,并且以信息的方式提醒用户,可有效避免因测站不稳定造成的姿态波动,从而提高掘进机推进施工质量。
了解更多VMT中国详情,请访问VMT中国官方微信:VMTChina,官方微信二维码: